Primary Triage
Systems Competition
During primary triage in the field, casualties are assessed to determine priorities for treatment on scene and transport of patients to hospital.
The objective of the Systems Competition is to detect and identify physiological signatures of injury derived from data captured by stand-off sensors onboard autonomous systems. This will enable early prioritization of casualties in primary triage, allowing medical care professionals to quickly focus on the most urgent casualties.
Teams will develop algorithms that detect those signatures in real-time from stand-off sensor data to provide decision support appropriate for austere and complex pre-hospital settings. Teams will use their stand-off sensors, robotic mobility platforms (e.g., UAVs, UGVs), and algorithms to autonomously process sensor data and provide real-time casualty identification and injury assessment. Of particular interest are signatures of acutely life-threatening conditions that medics are trained and equipped to treat during primary triage, such as hemorrhage and airway injuries.

Technical Challenge Elements:

Degraded Sensing
The courses are expected to include elements that range from constrained passages to large fields, lighted areas to complete darkness, and wet to dusty conditions. Sensors will need to have the dynamic range to operate reliably in these environments. Dust, fog, mist, smoke, talking, flashing light, hot spots, and gunshot and explosion sounds are within scope of this challenge element. Extreme temperatures, fire, tremors, and hazardous materials are not expected to be within scope.

Obscuring Obstacles
Casualties may be fully visible to partially obscured to completely obscured, such as buried under a shallow layer of rubble. Sensor modalities capable of penetrating rubble may have an advantage in such situations. Casualties may also be grouped with limbs overlapping, or may be interacting with live responders.

Terrain Obstacles:
The competition scenarios will be held in realistic environments that may include natural or human-made materials; structured or unstructured clutter; and intact or collapsed structures and debris. Robotic mobility is not the focus of this challenge and it is expected that widely available outdoor robotic platforms will be capable of navigating the competition environments. In some cases, more robust platforms may benefit from more direct navigation paths or closer approach paths to casualties.

Dynamic Obstacles
Live responders, ambulatory wounded, or other physical changes to the environment may be included to test the agility of the system autonomy to identify and assess casualties.

Dynamic Casualties
Some treatable injuries may rapidly become fatal, and delays in finding and assessing casualties may result in missing the window for effective LSI. While competitors are not expected to re-evaluate casualties for changes in status, casualties who are not evaluated within an appropriate timescale may have a change in status (for example, progression of untreated hemorrhage or airway injury).

Endurance Limits:
It is expected that individual scenarios will run <30 minutes. Teams may be permitted to replace batteries during their run, but teams should consider the implications of returning to the original launch location and redeploying their systems.
Real-World systems will use stand-off sensors on platforms to locate and triage casualties in the field
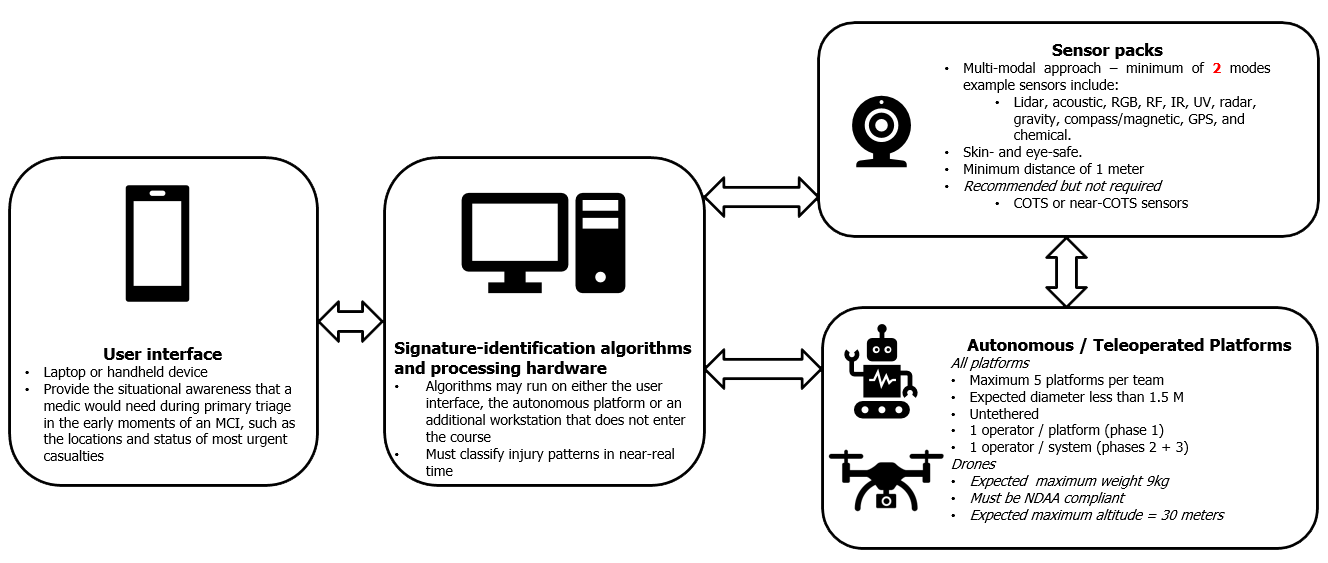
*Total system should fits in a single vehicle
Skills Required
Autonomous systems, sensors, UI development, machine learning, medical knowledge
Scoring Criteria
- Percent of casualties identified
- Accuracy in reporting casualty locations
- Accuracy of casualty injury classification
- Time to complete casualty assessments
- Identification of urgent casualties before the opportunity to address life-saving interventions (LSIs) would have closed
Team Qualification
For more information, please refer to team qualifications guide, the kick off slides and the broad agency announcement (BAA). Qualification is for self-funded teams only.